
TCOOP无刷电机驱动FOC驱动板
无刷电机驱动FOC驱动板
一、产品简介
无刷电机驱动,FOC驱动板

二、应用场景
主要用于无刷电机FOC控制学习,也可以用于风扇、风机,DIY车模、船模等。
三、产品概述
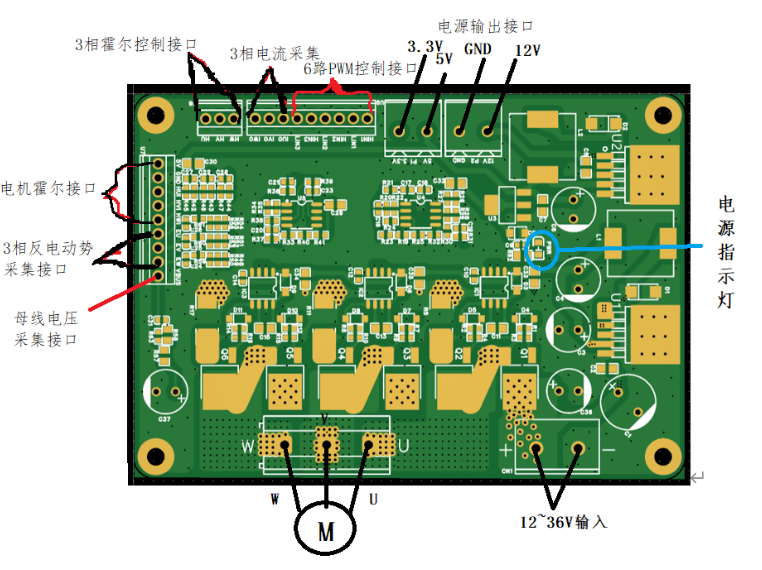
驱动板需要外接MCU才能正常工作,此项目使用的是CW32F030C8单片机。
主要电路:36V转12V转5V转3.3V,三相半桥驱动,反电动势采集,霍尔信号采集,三相电流采集,母线电压采集接口。信号采集接口均有阻容滤波。
36V转12V转5V均使用2596芯片,5V转3.3V使用1117芯片。
运放电路设计的放大倍数为5倍,如果电机最大电流5A以内的电机建议用0.05Ω,2W的采样电阻,电机最大电流5~10A的电机建议用0.02Ω,3W的采样电阻。
MOS管半桥驱动采用EG2131芯片,自带硬件互补功能(反相输入)。如果换其他半桥驱动芯片要注意芯片的控制逻辑。
信号线的接口为2.54mm,可以焊接端子也可以焊接排针。电源输入和电机三相接口为7.62mm,还有5.08mm的3.3V,5V,12V,GND接线端子,3.3V可以给单片机供电。
四、产品参数以及算法
驱动板尺寸:100*70mm
PCB设计:4层板,元器件单面布局
输入电压:12~36V
输出电压:3.3V、5V、12V
理论上持续电流:15A(建议10A以内使用)
峰值电流:25A(30度温升)
其中用到以下算法:
1. 估算转子位置和速度:通过测量电机的相电流和反电动势,可以估算出电机转子的位置和速度。
2. 空间矢量调制(Space Vector Modulation,SVM):将电机的三相电流转换为两个正交轴上的电流,即d轴电流和q轴电流。这一步骤可以通过三相电流的变换和逆变换来实现。
3. 电流控制:通过控制d轴电流和q轴电流的大小和相位来实现对电机电流的精确控制。常用的控制算法包括PI控制器和模型预测控制(Model Predictive Control,MPC)等。
4. 转矩控制:通过控制q轴电流的大小来实现对电机转矩的控制。通常采用PI控制器来实现转矩控制。
以上是FOC算法的基本步骤,具体的实现方式和参数调节可能会有所不同,取决于具体的无刷电机驱动板和应用需求。
五、使用说明
1、控制接口:
HIN1、LIN1、HIN2、LIN2、HIN3、LIN3分别为EG2131的逻辑输入控制接口,最终控制6个mos管的导通
IUO、IVO、IWO分别为电机UVW三相电流采集放大输出接口,运算放大器的放大倍数为5倍,偏置电压为1.65V左右(实际值为电机未启动前的电压)
EU、EV、EW为电机反电动势采集输出接口,分压倍数为21倍
VBUS:母线电压采集接口,分压倍数为41倍,采集的电压也就是电源电压除以41
2、霍尔接口:
5V:电机霍尔电源正
HU:电机霍尔U相
HV:电机霍尔V相
HW:电机霍尔W相
GND:电机霍尔GND负
3、电机接口:
U:电机U相
V:电机V相
W:电机W相
4、电源输出接口:
3.3V、5V、12V:分别为1117芯片和2596芯片的输出电压
GND:板子的地,整个板子只有一个地,也就是电源的负极
如果板子供电是正常的话pwr处的指示灯会亮。
六、备注
本项目由于元器件比较密集,焊接的话是用的LED灯珠拆焊加热片,加上锡膏,锡膏是用小袋子剪个小孔,然后把锡膏挤到焊盘上,然后放元器件,再放到加热片上焊接。
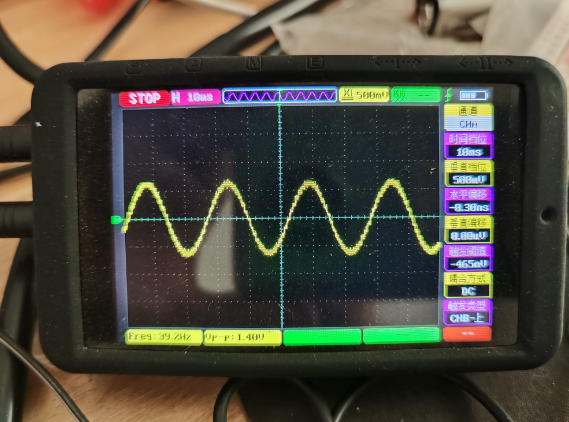
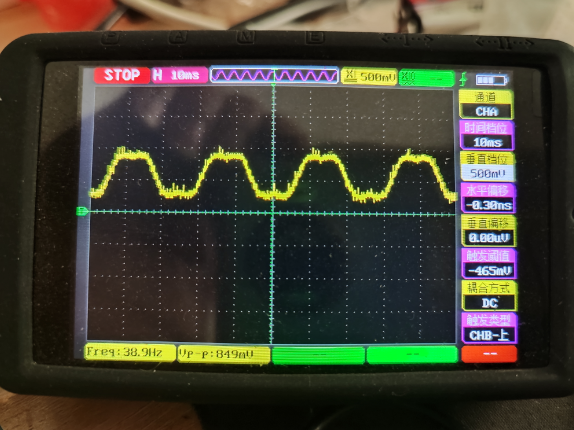
七、测试图片
SVPWM控制下的相电压和端电压的反电动势波形,正弦波和马鞍波。
以上就是关于无刷电机驱动FOC驱动板方案开发的内容分享及定制需求,如果您还有其他单片机方案开发需求,可以直接和我们联系或者在网站留言,我们将会尽快回复。通程创品专注于单片机应用方案的开发、MCU应用功能定制开发,致力于打造电子产业链最完整的单片机方案!
